BC/NW 2014 №2 (25):5.2
Реализация АЛГОРИТМов ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ ДЛЯ НАЗЕМНОЙ СТАНЦИИ АВТОМАТИЧЕСКОГО ЗАВИСИМОГО НАБЛЮДЕНИЯ
Горячев Н.В., Логинов В.А.
(ФГБОУ ВПО «Национальный исследовательский университет «МЭИ», Москва, Россия)
В данной работе рассматривается комплекс алгоритмов функционирования устройств цифровой обработки сигналов [1] для наземной станции автоматического зависимого наблюдения за воздушными объектами.
Возможности существующих систем наблюдения за воздушным движением в целях повышении безопасности и эффективности авиации ограничены. В таких зонах воздушного пространства как океанические поверхности, пустыни, горные районы и другие труднодоступные местности, размещение источников наземного базирования или невозможно, или экономически невыгодно. По этим причинам осуществляется внедрение потенциально более точной и дешевой, как в эксплуатации, так и в обслуживании, спутниковой системы навигации и наблюдения, базирующейся на технологии АЗН-В.
Результаты навигационных измерений передаются в центр управления воздушным движением (УВД) с заранее установленной периодичностью, зависящей не от угловой скорости вращения радиолокационной станции (РЛС), а от потребностей диспетчеров в обновлении данных о состоянии воздушного судна.
Автоматическое зависимое наблюдение-вещательное (АЗН-В) – это средство, с помощью которого воздушные суда, аэродромные транспортные средства и другие объекты могут автоматически передавать и (или) принимать данные об идентификации, местоположении, скорости, а также дополнительные данные в режиме радиовещания через канал передачи данных.
Наземная станция ES 1090 (Extended Squitter 1090 MHz – расширенный сквиттер 1090 МГц; здесь сквиттер – самогенерируемый сигнал – спонтанная передача приемоответчиком без необходимости запроса, вырабатываемая на псевдо-произвольной скорости или на основе произошедшего события) представляет собой часть системы, которая обеспечивает пилотов, авиадиспетчеров и других пользователей информацией о ситуации в воздушном пространстве и на территории аэропорта. Служба АЗН-В осуществляет сбор информации о местоположении, скорости и статусе от систем и датчиков на воздушном судне и транслирует эту информацию для других целей и наземных станций.
Система АЗН-В является автоматической, потому что не требуется внешнего воздействия человека; она является зависимой, так как опирается на источники навигации и радиопередающие системы на борту для предоставления информации наблюдения другим пользователям. Воздушное судно, начинающее радиопередачу, не будет знать, какие пользователи принимают его радиопередачу; любой пользователь, расположенный в воздухе или на земле, в пределах радиуса действия этой радиотрансляции может обрабатывать полученную информацию наблюдения АЗН-В.
Обобщенная структура навигации, наблюдения и организации воздушного движения с применением систем АЗН-В, первичной и вторичной радиолокации (ПРЛ и ВРЛ), приведена на рис.1.
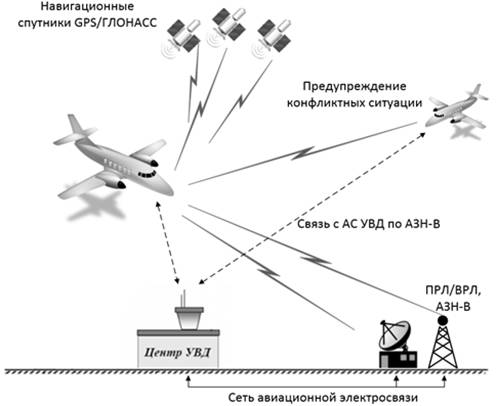
Рис. 1. Обобщенная структура навигации, наблюдения и организации воздушного движения
Сообщение АЗН-В – удлиненное сообщение, которое приемоответчики передают автоматически без необходимости запроса со стороны радиолокатора, чтобы посылать информацию другим воздушным судам или наземным станциям. Несущая частота всех ответов приемоответчиков составляет 1090 МГц. Ответ состоит из преамбулы и блока данных. Преамбула представляет собой последовательность из четырех импульсов, а блок данных – последовательность с двоичной фазово-импульсной модуляцией с частотой изменения данных 1 Мбит/с.
На рис. 2 приведена структурная схема наземной станции.
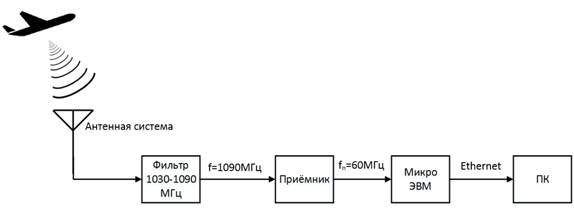
Рис. 2. Структурная схема наземной станции
Сигналы с приемоответчиков воздушных судов поступают на антенную систему, проходят через входной фильтр с полосой пропускания 1030 – 1090 МГц и поступают на блок приемника, обеспечивающего усиление, частотную селекцию и преобразование высокочастотных сигналов в сигналы промежуточной частоты 60 МГц. С выхода приемника сигналы поступают на микро ЭВМ, которая выполняет аналого-цифровое преобразование и дешифрацию ответных сигналов, формирование выходных кодограмм и их последующую передачу по сети Ethernet на персональный компьютер. Полученная информация в виде донесений в формате ASTERIX обрабатывается и отображается на экране в виде треков (прогрессивного ряда оценок о местоположении цели). Микро ЭВМ выполнена в виде одного типового элемента замены на базе микроконтроллера фирмы Atmel с архитектурой ARM 9 и программируемой логической интегральной схемы (ПЛИС) Spartan-3E45t фирмы Xilinx. Для поддержки сетевых протоколов на микроконтроллер установлена операционная система Linux версии 2.6.32. Для обмена данными с микроконтроллером на ПЛИС реализован интерфейс SRAM (статической памяти).
В предлагаемой статье рассматриваются алгоритмы приема и демодуляции сигналов АЗН-В, относящиеся к функции приема и декодирования наземной станции. Эти алгоритмы отвечают за обработку сигнала, полученного с приемной части станции. Конечным этапом данной обработки являются последовательности информационных бит сообщений АЗН-В, поступающих от воздушных судов.
Так как передачи сообщений от воздушных судов являются независимыми, несколько сообщений могут пересекаться на одном временном интервале, а также могут интерферировать с другой информацией в радиоканале, в результате чего могут возникать ошибки приема. Алгоритмы приема и демодуляции сигналов АЗН-В не должны предусматривать разделение таких наложенных сообщений АЗН-В, но должны обеспечивать прием ошибочных битов информации, а также неполных сообщений, т.е. любой информации АЗН-В из эфира.
Были разработаны основные блоки для реализации алгоритмов приема и обработки сигналов АЗН-В, а также в среде Matlab промоделирована их работа, а именно:
· вычисление огибающей исходного сигнала;
· увеличение отношения сигнал/шум;
· выделение синхропреамбулы для определения начала информационного блока сообщения;
· прием последовательности информационных битов.
Рассмотрим подробнее каждый из этих блоков, представленных на функциональной схеме на рис. 3.
В блоке вычисления огибающей производится демодуляция исходного сигнала, оцифрованного на частоте 80 МГц. В результате этого выделяется его низкочастотная амплитудная составляющая. Принцип работы данного блока основан на преобразовании Гильберта [2].
Полученная на основе реального исходного сигнала огибающая имеет отличия от теоретических расчетов (не имеет четко выраженных максимумов). Это связано с тем, что шум в канале связи и на выходе приемной системы при преобразовании аналогового сигнала в дискретный приводит к изменениям исходной формы сигнала и длительностей импульсов.
Поскольку входной сигнал является детерминированным, то задача его наблюдения (приема) заключается в установлении факта его наличия или отсутствия, для чего целесообразно использовать критерий максимума отношения сигнал/шум, который очень широко используется в радиолокационных системах [3].
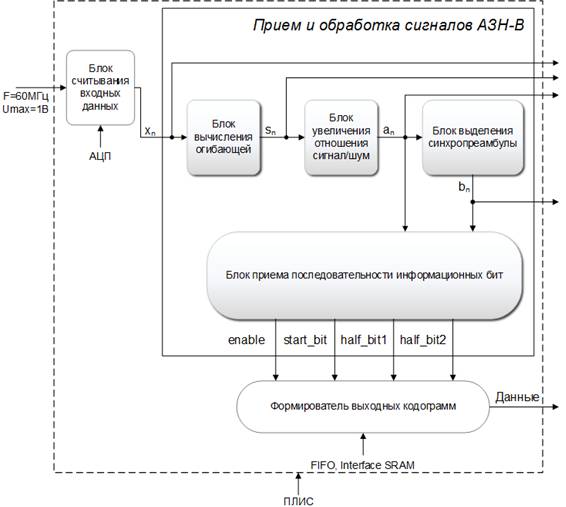
Рис. 3. Функциональная схема приема и обработки сигналов АЗН-В
Чтобы снизить влияние шума, используется метод накопления сигнала и его последующее усреднение. Для этого одна половина значений накопленного сигнала суммируется, а другая половина значений – вычитается. Поскольку воздействие низкочастотной составляющей шума на протяжении всего сигнала является постоянным, то ее влияние уменьшается за счет вычитания одной части накопленного сигнала из другой. Влияние на сигнал высокочастотной составляющей шума носит случайный характер и уменьшается за счет производимой операции суммирования.
Каждое ответное сообщение АЗН-В начинается с синхропреамбулы длительностью 8 мкс, за которой далее передается блок данных сообщения. Синхропреамбула определяет именно сигналы АЗН-В на фоне другой информации в радиоэфире.
Блок выделения синхропреамбулы предназначен для определения момента времени начала блока данных, с которого необходимо считывать информационные биты. В нем производится накопление сигнала в окне с интервалом в 8 мкс (длительность синхропреамбулы). Далее на данном интервале производятся вычисления, в результате которых формируется новый сигнал. Значения этого сигнала находятся в отрицательной области на всем интервале и только в момент окончания синхропреамбулы, а, следовательно, начала информационной части достигают своего положительного максимального значения.
В блоке приема последовательности информационных битов анализируются сигналы с выходов блоков выделения синхропреамбулы и увеличения отношения сигнал/шум. Определяется момент времени начала информационной части и на основании значений сигнала с блока увеличения отношения сигнал/шум определяются биты сообщения АЗН-В, в том числе и ошибочные. Полученные с выхода данного блока последовательности информационных битов сообщения АЗН-В передаются далее на микроконтроллер для последующей обработки информации наблюдения.
В результате выполнения данной работы получен программный код на языке VHDL, который используется для аппаратной реализации соответствующих блоков обработки сигналов АЗН-В.
Разработано программное обеспечение в среде Matlab, моделирующее работу алгоритмов приема и обработки сигналов АЗН-В. Представлен графический интерфейс для визуализации данных, которые формируются на каждом этапе обработки сигнала. Приведены результаты работы блока приема последовательности информационных бит, полученные в процессе моделирования в Matlab. Выполнена оптимизация и адаптация основных программных процедур блоков приема и обработки сигналов АЗН-В с целью их реализации на отладочной аппаратуре. Дан отчет ISE Design Suit 13.3[1] об использовании ресурсов ПЛИС Xilinx Spartan-3E45t с применением сгенерированного VHDL-кода основных функциональных блоков. На тестовой аппаратуре выполнена оценка работоспособности блоков путем сравнения результатов их работы с результатами моделирования.
Создание наземной станции АЗН-В находится на стадии экспериментальных исследований, поэтому разработанные алгоритмы могут быть использованы для оценки качества приема информации, а также для приблизительной оценки конечного выбора аппаратной базы для разрабатываемой наземной станции.
Преимуществами внедрения в автоматизированные системы управления воздушным движением оборудования АЗН-В являются низкая стоимость, высокая точность и большая скорость обновления данных по сравнению с действующими РЛС.
Результаты работы используются в исследованиях, проводимых на предприятии ОАО «НПО «ЛЭМЗ» (Лианозовский электромеханический завод, город Москва).
Литература
1. Логинов В.А. Алгоритмы и процессоры цифровой обработки сигналов. – М.: Изд-во МЭИ, 2000. – 64 с.
2. Солонина А.И., Улахович Д.А. Основы цифровой обработки сигналов. Изд. 2-е. – СПб.: БХВ-Петербург, 2005. – 768 с.
3. Купер Дж., Макгиллем К. Вероятностные методы анализа сигналов и систем: Пер. с англ. – М.: Мир, 1989. – 376 с.