BC/NW 2015 № 2 (27):12.1
ЮСТИРОВКА ВЫСОТОМЕРОВ РЛС С ИСПОЛЬЗОВАНИЕМ ТЕХНОЛОГИЙ СПУТНИКОВОЙ НАВИГАЦИИ И НОВЫХ ТЕХНОЛОГИЙ ЭЛЕКТРОННОГО НАБЛЮДЕНИЯ
Кочев М.Ю., Климов Ф.Н., Луньков А.П., Гарькин Е.В.
Плотность воздушного движения возрастает с каждым годом. К пилотируемым воздушным судам добавляется большое количество беспилотных самолётов и вертолётов различного назначения. При таком интенсивном воздушном движении для обеспечения контроля требуется высокое качество определения координат воздушных судов. В этих условиях необходимым является совмещение, и обобщение в реальном масштабе времени информационных потоков от множества РЛС и других систем наблюдения за воздушным пространством.
Радиолокационные станции подвергаются воздействию ветровой нагрузки, метеорологических осадков, обледенению, перепадов температур и влажности, что приводит к потере точности измерения координат. Кроме этого, снижение точности измерения происходит из-за механического износа деталей антенно-поворотных устройств локаторов. Качество радиолокационного измерения координат воздушных судов повышают путём регулярной и своевременной юстировки РЛС [3].
Сегодня, когда появился информационный поток от новых точных систем электронного наблюдения АЗН-В (Автоматическое Зависимое Наблюдение - Вещание) и МПСН(Многопозиционные системы наблюдения), обеспечена основа повышения точности радиолокаторов, за счёт юстировки на базе этих новых данных.
При внедрении в жизнь концепции «свободных полётов» (Free Flight), в воздушном пространстве мира, ключевую роль будут играть технологии, основанные на глобальных навигационных спутниковых системах и на новейших системах электронного наблюдения. Точность определения координат воздушных объектов с помощью новых систем электронного наблюдения (АЗН-В и МПСН) выше в 3-5 раз, чем у классических радиолокаторов.
В связи с этим, в настоящее время актуальной задачей, определяющей расширение возможностей автоматических систем управления (АСУ) контроля использования воздушного пространства (КИВП), является системный анализ способов её построения, разработка методов и алгоритмов комплексной обработки информации, поступающей, в том числе, и от новых систем электронного наблюдения.
Новые технологии электронного наблюдения за воздушным пространством (АЗН-В и МПСН) могут быть применены не только для юстировки РЛС по дальности и азимуту, но и по углу места. Как известно, новые электронные системы наблюдения выдают высоту воздушного объекта с высокой точностью МПСН по данным ГССН и система АЗН-В барометрическую высоту и абсолютную высоту по данным ГССН, относительно эллипсоида. Получая расчётную высоту от новых систем электронного наблюдения (НЭСН) можно отъюстировать высотомер или трёх координатный радиолокатор по углу места.
Предлагаемые, мною и моим научным руководителем Сухов В.В. новые способы юстировки высотомеров РЛС могут быть использованы на радиолокаторах систем контроля воздушного пространства, систем управления средствами воздушно-космической обороны, а также управления воздушным движением.
Предлагаемый способ юстировки заключается в том, что используются спутниковой навигатор, находящиеся на юстируемой РЛС. Спутниковые навигаторы так же используются новыми электронными системами наблюдения (в МПСН спутниковые навигаторы имеются на каждой позиции, а в системе АЗН-В спутниковые навигаторы имеются в составе бортовой аппаратуры воздушных судов). Зная точно координаты собственного местонахождения и координаты наблюдаемого воздушного объекта, измеренные РЛС и новой электронной системой наблюдения, интерполируем эти данные к единому моменту времени, легко производим расчёт ошибки высотомера РЛС по углу места. За тем производим корректировку юстировки высотомера РЛС.
На рис.1 схематично представлено расположение высотомера юстируемой РЛС 3 и воздушного объекта 2, информация от которого используется для юстировки. Юстируемая РЛС 3 предварительно юстируется по дальности и азимуту одним из способов который представлен ранее в этой главе. С помощью спутникового навигатора, как в системе АЗН-В или с помощью мультилатерационного расчёта определяет высоту наблюдаемого воздушного объекта 2 (ZНЭСН).
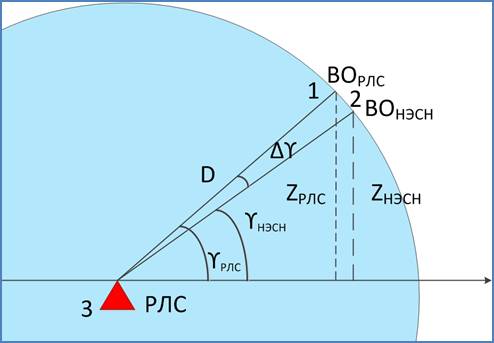
Рис. 1 Схема юстировки высотомера РЛС
Вследствие изначально ошибочной юстировки РЛС измеренный угол места воздушного объекта 1 (ϒРЛС) будет отличаться от его истинного значения 2 (ϒНЭСН), определенный по данным новых электронных систем навигации. Взаимное расстояние точек 1 и 1 характеризуется расхождениями угла места
Δϒ = ϒРЛС – ϒНЭСН.
При
этом ![]()
где
D это дальность,
следовательно, ![]() ,
,
а ошибка юстировки по углу места
![]() .
.
![]()
В наши дни, когда идёт бурное освоение природных ресурсов малозаселённых территорий севера, шельфа морей и океанов, нельзя обойтись без автоматизации радиолокационного наблюдения и контроля воздушного пространства. Наиболее передовой технологией является – автоматические РЛС, так как они дают возможность, оптимально используя человеческие ресурсы, не только сохранить, но и увеличить зону контроля воздушного пространства. Предложенные способы юстировки позволяют автоматическим локационным станциям поддерживать высокую точность измерения координат воздушных судов, как в автономном режиме, так и при работе в системе.
Основные преимущества способов юстировки, основанных на информации от новых электронных систем наблюдения (АЗН-В и МПСН) по сравнению с существующими способами [5]:
- определение корректировок без вывода РЛС из режима нормального функционирования;
- возможность определения корректировок в автоматическом режиме особенно важно для роботизированных радиолокаторов;
- упрощение процесса юстировки, особенно в территориальных комплексах;
- использование для контроля случайные воздушные объекты оснащённые аппаратурой АЗН-В (режим ES);
- юстировка может проводиться в автоматическом режиме, корректируя ошибки, возникающие от ветровых нагрузок и температурных колебаний.
Актуальность применения новых способов юстировки РЛС высока и для боевых систем в мирное время. Беспилотные самолёты, дирижабли, а так же катера и сухопутные боевые машины без экипажа, так же будут оснащаться автоматическими РЛС. Все эти роботизированные боевые системы базируются на использовании спутниковой навигации и используют технологию АЗН-В или близкий аналог таковой.
Литература
1. Способ юстировки радиолокационных станций: пат. №2069867, Рос. Федерация. МПК G01S7/497 / Абезгауз Я.И.; заявитель и патентообладатель Московский науч.- ислед. ин-т приборной автоматики - №93018980/09; заявл. 13.04.93; опубл. 27.11.96.
2. Способ юстировки радиолокационных станций системы автоматического управления: пат. № 2529875 Рос. Федерация МПК G01S7/40 / Сухов В.В., Савватеев В.С.; № 2002148572; заявл. 05.11.12.
3. Сухов В.В. Новые методы юстировки радиолокационных станций с использованием современных технологий спутниковой навигации и автоматического зависимого наблюдения / В.В. Сухов, В.С. Савватеев. - Успехи современной радиоэлектроники 2013. №11 29-33 с.
4. Сухов В.В. Вопросы использования современных технологий автоматического зависимого наблюдения и мультилатерации в системах ВКО и УВД / В.В. Сухов, В.С. Савватеев, - Вестник ВКО
5. Сухов В.В. Внедрение технологии автоматического зависимого наблюдения в системы контроля воздушного пространства / В.В. Сухов.- Новые технологии. 2012. №1 с.67-70