BC/NW 2015 № 2 (27):6.1
МЕТОД ПОВЫШЕНИЯ ТОЧНОСТИ ОПРЕДЕЛЕНИЯ КООРДИНАТ ВОЗДУШНЫХ ОБЪЕКТОВ ЗАГОРИЗОНТНЫМИ РЛС
Кочев М.Ю., Климов Ф.Н., Луньков А.П., Гарькин Е.В.
С возрастанием дальности действия средств воздушного нападения, таких как крылатые ракеты и беспилотные самолёты, возрастает необходимость контролировать воздушное пространство на больших расстояниях от наших границ. Долгие годы единственным средством наблюдения на больших расстояниях являлись загоризонтные локаторы, обеспечивающие обнаружение летательных аппаратов на дальних рубежах. Так как загоризонтные радиолокационные станции (ЗГ РЛС) используют эффект отражения радиоволн от ионосферы и поверхности планеты они не могут обеспечить высокую точность определения координат летательного аппарата. Причём чем больше дальность обнаружения воздушных объектов, тем меньше точность определения их координат. Каждое отражение электронного луча загоризонтного локатора от поверхности земли и ионосферы вносит свою погрешность. Неровности поверхности земли и нестабильность высоты слоя ионосферы, от которого отражаются радиоволны, вносят значительные погрешности в точность определения координат воздушных объектов (см. рис.1).
Вторым средством наблюдения за воздушным пространством на больших расстояниях являются спутники системы предупреждения о ракетном нападении (СПРН). Эти спутники, используя бортовую оптическую аппаратуру, которая фиксирует координаты места пуска ракет по факелу работающего разгонного реактивного двигателя.
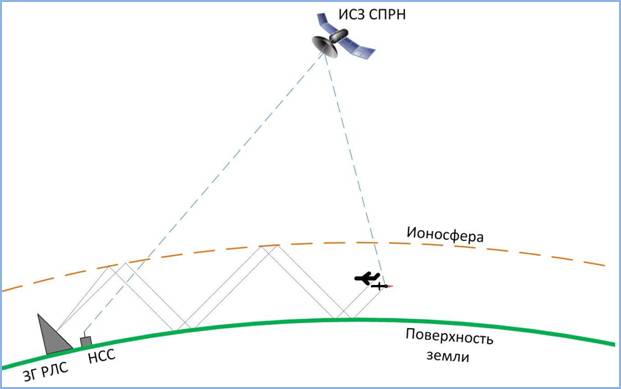
Рис.1 Контроль воздушного пространства на большой дальности.
Но сегодня появилась такая технология как вещательное автоматическое зависимое наблюдение (АЗН-В). Информацию с наземных стаций системы АЗН-В собирают и обобщают с данными от обзорных РЛС. Таким образом, создано почти глобальное поле электронного наблюдения за воздушным пространством. Это электронное поле наблюдения ограничено только возможностью разместить наземные станции на берегу океанов и дальностью прямой видимости воздушных объектов, ограниченной кривизной поверхности земли. Кроме того, большая часть наземных станций размещена на территории стран НАТО. Следовательно, в данные получаемые от наземных станций иностранных государств могут быть внесены искажения, что неприемлемо для систем контроля воздушного пространства.
Информация о воздушном пространстве, приходящая от наземных станций АЗН-В и РЛС, собрана в основном на суше или вдоль береговых линий континентов. Точных полётных данных о воздушных объектах над океанами в удалении от береговой линии нет. Нет так же информации о воздушном пространстве в горных массивах континентов и приполярных районах из-за низкой плотности населения и инфраструктуры в данных регионах планеты.
Следовательно, отследить запуск беспилотного самолёта, крылатой ракеты в горах или в океане очень сложно. Это создаёт высокие риски в наше время, так как такие системы могут быть применены для террористических и диверсионных актов. Особенно если учесть то, что запуск крылатой ракеты или ударного беспилотного самолёта может быть осуществлён из торпедного аппарата сторожевого катера, с внешней подвески самолёта или с пусковой установки замаскированной под стандартный морской контейнер расположенный на гражданском сухогрузе, автомобильном прицепе или железнодорожной платформе.
Скорости большинства беспилотных самолётов и крылатых ракет среднего радиуса действия близки к скоростям пассажирских воздушных судов, следовательно, полёт таких средств нападения может быть замаскирован под обычное воздушное движение. Это ставит перед системами контроля воздушного пространства задачу выявления и идентификации таких средств нападения от момента пуска и на максимальной дальности от наших границ для обеспечения эффективного поражения их средствами ВКС.
Для решения данной задачи необходимо применять все имеющиеся и разрабатываемые системы наблюдения за воздушным пространством, в том числе вещательное автоматическое зависимое наблюдение (АЗН-В).
Для отслеживания воздушных судов над океанской поверхностью и в горных массивах континентов предлагается использовать спутниковые группировки. Эту задачу, возможно решить, разместив на бортах спутников ретрансляционное оборудование обеспечивающее сбор АЗН-В информации от воздушных судов и передачу её на наземные станции.
Такую спутниковую технологию сбора и ретрансляции полётной информации сейчас разрабатывают несколько иностранных и отечественных предприятий (см. рис.2).
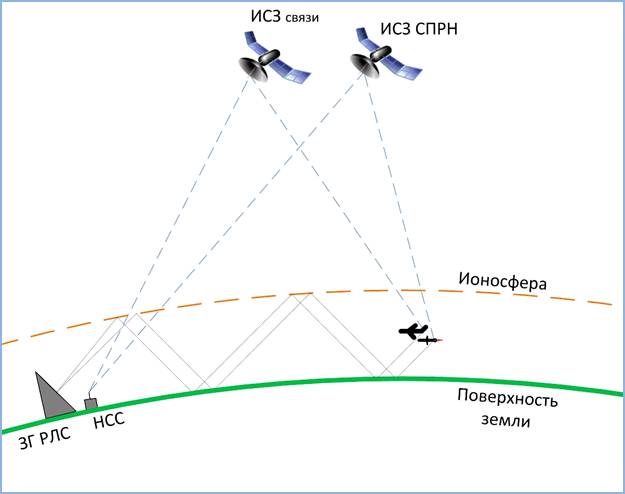
Рис. 2 Использование ретрансляции информации АЗН-В через спутник.
Почти все коммерческие воздушные суда оснащены навигационной аппаратурой, по данным которой формируются координатные сообщения, передаваемые по системе АЗН-В. Если применить спутниковую ретрансляцию координатных данных передаваемых по системе АЗН-В, то мы можем использовать эти данные для повышения точности работы загоризонтных радиолокационных станций (ЗГРЛС).
Географические координаты воздушного объекта, измеренные бортовой навигационной аппаратурой и переданные через спутник мы можем пересчитать в систему координат используемую на ЗГРЛС. Пересчитанные координаты воздушного объекта мы интерполируем на момент времени измерения его координат загоризонтным локатором. Далее получаем разницу по каждой координате, по которой мы можем скорректировать работу ЗГРЛС на данном участке воздушного пространства. Эти корректировки учитывают отражательные свойства поверхности и ионосферы Земли. Если свойства ионосферы меняются со временем, то свойства поверхности земли более стабильны. Следовательно, большую часть погрешностей измерения ЗГ РЛС мы сможем учесть, повысив точность измерений почти в два раза.
Если данную информацию использовать для корректировки данных от загоризонтных РЛС, это даст не только повышение точности определения местоположения воздушных объектов, но и даст поток параметрических данных для селекции опасных воздушных объектов, в потоке коммерческих воздушных судов. Точные данные о местоположении гражданских воздушных судов дадут информацию для выработки режимов ЗГРЛС при работе с аэродинамическими целями, оценки состояния трасс радиосигналов и выработки рекомендаций по выбору режимов работы станций (длительности импульсов и рабочих частот).
Такая информация должна учитывать задержки передачи данных через спутник. Оценим задержки передачи данных для этой системы на примере простейшего алгоритма ретрансляции сообщений. Пусть имеется спутниковый канал связи, соединяющий воздушное судно А с приемным наземным пунктом В, через спутник С. Задержка распространения сигнала от А до спутника С равна τ1 секунд. Задержка распространения сигнала от спутника С до наземной станции В равна τ2 секунд. Задержка обработки сообщения ретранслятором τ3 секунд. Воздушное судно А в момент времени T1 начинает передачу пакета информации.
Приемный спутник получит последний бит информации в момент времени:
![]() .
.
После чего обрабатывает сообщение τ3 сеунд и направит пакет на наземную станцию в момент времени:
![]()
Далее цикл передачи повторяется. Таким образом, за время:
![]()
будет передано сообщение от источника к приемнику.
Рис. 3 Схема передачи данных с летательного аппарата на наземную станцию.
Задержки распространения сигналов τ1 и τ2 зависят от наклонных дальностей dсс на линии «Самолёт-Спутник» и dсз на линии «Спутник –Земля»:
![]() ,
,
![]() ,
,
где v скорость света, v =299792458 м/с.
Наклонная
дальность на линии «Самолёт-Спутник»
зависит от мощности бортового транспондера и чувствительности приёмной системы
спутника. Современная стандартная бортовая аппаратура воздушных судов и стволов
спутников позволяет принимать информацию с максимальной наклонной дальностью не
более dсс макс =2256 км.
Следовательно, ![]() . При такой наклонной дальности
связи мы можем использовать только низкоорбитальные спутники связи.
. При такой наклонной дальности
связи мы можем использовать только низкоорбитальные спутники связи.
Максимальная дальность dсз макс, на которой можно установить связь наземной станции со спутником определяется высотой орбит спутниковой группировки (см. таб. 1).
Рассчитанные задержки при использовании различных спутниковых систем представлены в таб. 1.
Таблица 1
|
Спутниковые группировки |
Орбком |
Иридиум |
Гонец |
Глобалстар |
Сигнал |
|
Высота орбиты, км |
670 |
780 |
1400 |
1414 |
1500 |
|
Максимальная наклонная дальность видимости спутника dсз макс, км |
3000,55 |
3250,73 |
4453,63 |
4478,06 |
4626,19 |
|
τ1макс, с |
0,00753 |
0,00753 |
0,00753 |
0,00753 |
0,00753 |
|
τ2макс, с |
0,01001 |
0,01084 |
0,01486 |
0,01494 |
0,01543 |
|
τ3макс, с |
0,020 |
0,020 |
0,020 |
0,020 |
0,020 |
Для расчётов используются данные о существующих и перспективных низкоорбитальных группировках спутников связи.
Задержки передачи данных через низкоорбитальный спутник связи приемлемы для систем наблюдения и могут быть учтены при расчётах трасс воздушных объектов в системах наблюдения. Пропускная способность системы связи обеспечивает наблюдение за воздушным движением над океанами.
Предлагаемая система передачи полётных данных через спутники низкоорбитальной группировки связи позволяет:
- получить данные для выработки оптимальных режимов станций ЗГРЛС;
- оценить состояние трассы радиосигнала ЗГРЛС и выбрать оптимальный режим работы станции, длительность импульсов и рабочих частот;
- корректировать работу ЗГРЛС повышая точность определения координат воздушных объектов;
- идентифицировать воздушные объекты по степени опасности на большой дальности;
- передавать полётные данные с приемлемыми задержками для систем контроля воздушного пространства ЕС ОрВД и ВКС;
- получать полётную информацию от воздушных судов независимо от зарубежных систем наблюдения воздушного пространства и систем связи;
- расширить зону контроля за коммерческими воздушными судами на дальность до 4500 км, а при использовании межспутниковой связи глобально.
Список литературы
1. Сухов В.В. Новые методы юстировки радиолокационных станций с использованием современных технологий спутниковой навигации и автоматического зависимого наблюдения / В.В. Сухов, В.С. Савватеев. - Успехи современной радиоэлектроники 2013. №11 29-33 с.
2. Сухов В.В. Вопросы использования современных технологий автоматического зависимого наблюдения и мультилатерации в системах ВКО и УВД / В.В. Сухов, В.С. Савватеев, - Вестник ВКО
3. Сухов В.В. Технология спутниковой навигации в системе контроля использования воздушного пространства / В.В. Сухов. - Труды Х Российской научно-технической конференции «Новые информационные технологии в системах связи и управления» - Калуга: Изд-во ООО «Ноосфера» - 2011,- 146-150 с.
4. Сухов В.В. Метод верификации сообщений в системе автоматического зависимого наблюдения Инновационные подходы при создании военной техники / В.В. Сухов; Под ред. П.А. Созинова – М.: Радиотехника, 2012. – с. 130-136