BC/NW 2018 № 1 (32)
РАЗРАБОТКА АЛГОРИТМА ВИХРЕТОКОВОГО ДЕФЕКТОСКОПИИ ТОКОПРОВОДЯЩИХ ПОВЕРХНОСТЕЙ
Мачарадзе Г.Т.
Переход от аналоговой обработки сигналов к цифровой (ЦОС) позволил проектировать устройства с меньшими габаритами и с большей точностью.
Дефект – каждое отдельное несоответствие продукции требованиям, установленным нормативной документацией (ГОСТ 15467-79, [1]).
Дефектоскопия – область техники и технологии, занимающаяся разработкой и использованием дефектоскопов.
Дефектоскоп – устройство для обнаружения дефектов в изделиях из различных материалов методами неразрушающего контроля.
Неразрушающий контроль – контроль надежности основных рабочих свойств и параметров объекта, не требующих выведения объекта из работы либо его демонтажа. Выделяют и разрушающий контроль, именуемый также краш-тестом.
В настоящее время для дефектоскопии различных поверхностей существует ряд устройств – дефектоскопов, большая часть которых, будучи созданными в советские годы, используют чисто аналоговую обработку.
Современные дефектоскопы применяют элементы цифровой обработки сигналов, но используемые в них алгоритмы в открытых источниках не задокументированы.
Учитывая вышесказанное, цель диссертации - разработка и реализация алгоритма ЦОС для дефектоскопа токопроводящих поверхностей, является актуальной.
1. ОБЗОР ПРЕДМЕТНОЙ ОБЛАСТИ
1.1 Вихретоковый неразрушающий контроль
В основе данного метода лежат вихревые токи. Вихревые токи – замкнутые электрические токи в проводнике, которые возникают при изменении пронизывающего его магнитного потока. В отличие от электрического тока в проводах, текущего по точно определенным путям, они замыкаются непосредственно в проводящей массе, образуя вихреобразные контуры.
Величина вихревых токов определяется по закону Ома:
![]()
где ![]() - ЭДС индукции, наводимая в проводнике,
R – сопротивление цепи вихревого тока.
- ЭДС индукции, наводимая в проводнике,
R – сопротивление цепи вихревого тока.
С учетом закона электромагнитной индукции, согласно которому:
![]()
где ![]() - магнитный поток, сцепленный с контуром
тока получаем:
- магнитный поток, сцепленный с контуром
тока получаем:
![]()
Подсчитать R достаточно сложно, но очевидно, что величина сопротивления пропорциональна удельной проводимости материала проводника и обратно пропорциональна его размерам. В массивных проводниках R мало и вихревые токи могут достигать большой силы даже в не очень быстро меняющихся магнитных полях.
Вихревые токи вызывают сильное нагревание проводников. На это впервые обратил внимание физик Фуко, поэтому вихревые токи обычно называют токами Фуко. Согласно закону Джоуля-Ленца, выделяемая теплота определяется следующим равенством:
![]()
откуда следует, что количество теплоты, выделяемое в единицу времени пропорционально квадрату частоты изменения магнитного поля.
В качестве источника электромагнитного поля выступает вихретоковый преобразователь, представляющий из себя одну или несколько катушек индуктивности.
Когда пропускают через первичную катушку переменный ток, в ней возникает переменное магнитное поле (явление самоиндукции). Величина магнитного потока в этом случае определяется следующим образом:
![]()
где ![]() – магнитный поток,
– магнитный поток, ![]() – индуктивность первичной катушки
вихретокового преобразователя,
– индуктивность первичной катушки
вихретокового преобразователя, ![]() – ток, протекающий в катушке.
– ток, протекающий в катушке.
Магнитное поле, создаваемое вихретоковым преобразователем, проникает в объект контроля, в результате чего в нем возникают вихревые токи. Распределение вихревых токов зависит от частоты первичного переменного поля, магнитной проницаемости материала, удельного электрического сопротивления материала, а также от взаимного геометрического расположения объекта контроля.
Вихревые токи, в свою очередь, порождают вторичное магнитное поле, которое наводит ЭДС на вторичной катушке вихретокового преобразователя.
Наличие дефектов в области протекания вихревых токов видоизменяет их траекторию.
Анализируя параметры ЭДС (амплитуда, фаза), наводимого вторичным полем, можно сделать вывод о наличии или отсутствии дефектов в объекте контроля.
1.2 Методы вихретокового неразрушающего контроля
К основным методам вихретокового контроля относятся:
· Амплитудный метод вихретокового неразрушающего контроля, основанный на измерении амплитуды сигнала преобразователя
· Фазовый метод вихретокового неразрушающего контроля, основанный на измерении фазы сигнала преобразователя
· Переменно-частотный метод вихретокового неразрушающего контроля, основанный на анализе и синтезе амплитуды и частоты сигнала вихретокового преобразователя
· Импульсный метод вихретокового неразрушающего контроля, основанный на измерении амплитуды и длительности сигнала вихретокового преобразователя импульсной формы
· Модуляционный метод вихретокового неразрушающего контроля, основанный на анализе сигнала вихретокового преобразователя, модулируемого в результате изменения в пространстве параметров объекта, при относительном перемещении преобразователя и объекта контроля
· Дифференциальный метод вихретокового неразрушающего контроля, основанный на измерении сигнала вихретокового преобразователя, обусловленного приращением контролируемого параметра
· Спектральный метод вихретокового неразрушающего контроля, основанный на измерении спектрального состава сигнала вихретокового преобразователя;
· Метод рассеянного излучения, когда осуществляется регистрация рассеянных волн или частиц, отраженных от дефекта;
· Эхо-метод или метод отраженного излучения, когда регистрируются отраженные от дефекта поля и волны.
2 ТЕОРЕТИЧЕСКОЕ ОБОСНОВАНИЯ РАЗРАБАТЫВАЕМОГО АЛГОРИТМА
2.1 Анализ математических соотношений
Линии напряжённости вихревого электрического поля, возбуждаемого переменным током, идущем по проводу, намотанному на катушке, представляют собой окружности. Это поле в свою очередь возбуждает вихревой электрический ток в проводнике, находящемся вблизи катушки, причем линии поля наведенного тока имеют ту же форму окружностей в однородной проводящей среде (рис. 1а).
При наличии в проводящей среде неоднородности, например, поперечной трещины (рис. 1б), на границах этих дефектов происходит накопление электрических зарядов. Это в свою очередь создаёт электрическое поле зарядов, за счёт которого происходит «скольжение» электрического тока вдоль дефектов.
Рис. 1. Линии напряженности электрического поля и вихревых токов: а – в отсутствии трещины; б – в присутствии трещины
Таким образом, границы дефектов являются участками накопления электрического заряда и, следовательно, эти дефекты обладают некоторой емкостью. Например, схеме распределения линий электрического тока вблизи поперечной трещины можно сопоставить эквивалентную электрическую схему (рис. 2), где трещина представляет собой два конденсатора ёмкостью С (и соответствующим ёмкостным сопротивлением XC), соединённых двумя резисторами, сопротивление RT которых представляет собой прилегающий к трещине слой проводящей среды. Элементы Zo символизируют эффективный слой материала вдоль линий вихревого поля (включает в себя активное сопротивление Ro и индуктивность Lo, обусловленную взаимным влиянием вихревых токов). ЭДС индукции, наводимая ВТП в материале представлена элементами ε.
Рис. 2. Эквивалентная электрическая схема распределения
токов вблизи трещины
В эквивалентной схеме можно выделить 2 граничных случая:
·
![]() - отсутствие
дефекта;
- отсутствие
дефекта;
·
![]() - дефект представляет собой
сквозное отверстие в ОК.
- дефект представляет собой
сквозное отверстие в ОК.
Таким образом,
чем глубже дефект, тем больше сопротивление ![]() (и
тем меньше величина C) и наоборот.
(и
тем меньше величина C) и наоборот.
Рассмотрим зависимость фазы сигнала, снимаемого с ВТП, от глубины трещины. В [3, стр. 17] приводится формула для определения разности фаз между подаваемым на ВТП и снимаемым с ВТП напряжениями
 ,
,
где![]() ,
,![]()
Определим модуль
комплексной функции ![]() , тем самым перейдя к функции
, тем самым перейдя к функции
![]() :
:
Докажем, что
функция ![]() монотонно возрастает на полуинтервале [0;
монотонно возрастает на полуинтервале [0;
![]() ). Для этого необходимо, чтобы
производная
). Для этого необходимо, чтобы
производная ![]()
![]() .
Учитывая тот факт, что и числитель, и знаменатель функции
.
Учитывая тот факт, что и числитель, и знаменатель функции ![]() больше 0, получим:
больше 0, получим:

С учетом того,
что![]() ,получим:
,получим:

Обозначим:
![]()
![]()
Тогда![]()
Упростим функции
![]() и
и![]() :
:


Вычитая первую из второй, получим квадратный трехчлен:
![]()
Посчитаем дискриминант:
![]()
Дискриминант
принимает отрицательное значения при любых C, поэтому
разность![]() , а
, а ![]() . Следовательно,
производная
. Следовательно,
производная ![]() . Таким образом, доказано, что функция
. Таким образом, доказано, что функция ![]() монотонно возрастает на полуинтервале [0;
монотонно возрастает на полуинтервале [0;
![]() ).
).
Резюмируя вышесказанное, отметим, что при возникновении дефекта в объекте контроля происходит уменьшение смещения обратного сигнала относительно эталонного. И чем больше глубина дефекта, тем меньше это смещение.
2.2 Анализ существующих аналогов
В настоящее время существует ряд вихретоковых дефектоскопов. Некоторые из них:
1) ВД-12 НФ – еще советская разработка, выполненная в конце 80-х годов 20 века. Дефектоскоп построен исключительно на аналоговой технике.
2) ВИД-345 – реализует комбинацию магнитного и вихретокового методов выявления дефектов. В состав входит датчик, электронный блок приема и преобразования сигналов с датчика и блок питания. Оцифрованные сигналы с блока оцифровываются и поступают в микроконтроллер. Контроллер позволяет получать данные о дефектах на графическом дисплее.
3) ВД-70 – новейшая разработка. В ней реализуется цифровая обработка сигнала, позволяющая проводить контроль с более высокой точностью, чем на аналоговых приборах. Цифровая обработка также позволяет реализовать другие потребительские функции, такие как запоминания изображения дефекта, режим «заморозки» изображения экрана, связь с компьютером позволяет создать отчет по результатам контроля.
2.3. Подтверждение необходимости и актуальности разработки
Основным недостатком большинства рассмотренных аналогов является факт отсутствия в открытых источниках документации, в которой бы приводился принцип функционирования устройства (как программной, так и аппаратной частей). Единственный дефектоскоп, на который существует такая документация – это ВД-12 НФ [4], который построен на аналоговой обработке данных.
Данная диссертация призвана устранить этот недостаток и разработать алгоритм для вихретоковой дефектоскопии токопроводящих поверхностей, используя лишь цифровые методы обработки сигналов, что помимо прочего позволит снизить габариты конечного изделия и уменьшить стоимость.
3 РАЗРАБОТКА АЛГОРИТМА ДЕФЕКТОСКОПИИ
Как было показано в предыдущих разделах, факт наличия дефекта в объекте контроля сопровождается уменьшением разности фаз между двумя сигналами – эталонным и обратным. Эталонным называется сигнал, который поступает на вход вихретокового преобразователя, а обратным – сигнал, снимаемый с вихретокового преобразователя. Таким образом, разрабатываемый алгоритм должен обеспечивать измерение фазы эталонного и обратного сигналов, а затем по полученным данным делать вывод о наличии дефекта в объекте контроля.
Прежде чем переходить к разработке алгоритма, необходимо разобраться со структурой данных этого алгоритма, то есть понять какие данные и в каком виде будут поступать на вход алгоритма. В связи с этим целесообразно разработать обобщенную структурную схему дефектоскопа.
3.1 Разработка обобщенной структурной схемы дефектоскопа
В состав простейшего вихретокового дефектоскопа должен входить блок, вырабатывающий эталонный сигнал в аналоговой форме, который поступает на вихретоковый преобразователь. Функцию данного блока можно реализовать с помощью цифро-аналогового преобразователя под управлением микропроцессора.
И эталонный сигнал, и обратный сигнал, снимаемый с ВТП, необходимо передать в микропроцессор для обработки, поэтому необходимо их привести к цифровому виду, вследствие чего необходимо использовать аналого-цифровые преобразователи для оцифровки этих двух сигналов.
Таким образом, на вход алгоритма в микропроцессор поступают два массива данных, соответствующих оцифрованным эталонному и обратному сигналам.
В случае обнаружения алгоритмом дефекта в объекте контроля целесообразно использовать звуковую индикацию.
Резюмируя вышесказанное, отметим, что простейший вихретоковый дефектоскоп должен включать в себя микроконтроллер, ЦАП, два АЦП, блок индикации и непосредственно сам ВТП с ОК. Обобщенная структурная схема дефектоскопа приведена ниже на Рис.3.
Рис.3. Обобщенная структурная схема дефектоскопа
3.2 Разработка схемы алгоритма дефектоскопии
Измерение разности фаз эталонного и обратного сигналов (смещения обратного сигнала относительно эталонного сигнала) можно осуществить путем измерения временного интервала между двумя одинаковыми точками этих сигналов.
Так как ВТП представляет собой несколько катушек, то в качестве эталонного сигнала должен выступать гармонический сигнал. Для упрощения дальнейшей обработки этого сигнала целесообразно использовать только положительную полуволну. Поскольку нужно получить реакцию ВТП на эталонный сигнал в виде обратного сигнала, то разумно в каждой итерации алгоритма подавать только одну положительную полуволну синусоидального сигнала. Сигналы такого вида имеют две “удобные” точки, между которыми легко рассчитать временной интервал – точка первой производной (точка максимума) и точка второй производной (точка перегиба). В данном случае будем использовать для расчетов точки перегиба, так как они обладают большей устойчивостью к случайным колебаниям.
Схема алгоритма приведена на Рис.4. Работа дефектоскопа состоит из двух этапов – калибровка и непосредственно поиск дефекта. Для выбора соответствующего режима служит глобальная переменная Calibration_MODE логического типа, которая изменяется непосредственно пользователем, например, при нажатии соответствующей кнопки. Значение данной переменной является входным параметром для алгоритма. Помимо Calibration_MODE, входными параметрами являются константы CalibrMaxInd и MaxInd, которые определяют количество элементов в массиве разностей абсцисс нулей вторых производных, при котором происходит расчет статистических характеристик для режимов калибровки и поиска дефектов соответственно, причем справедливо соотношение: CalibrMaxInd>MaxInd. Увеличение значений CalibrMaxInd и MaxInd приведет к повышению точности диагностики, но существенно снижает быстродействие из-за необходимости накапливания большего количества данных. И, наконец, входным параметром также является переменная, определяющая чувствительность устройства SENSIVITY.
В начале алгоритма происходит инициализация переменных (блок 2). К таковым относится порядковый номер данных ind. После инициализации происходит ожидание данных с АЦП (блоки 3,4) – массивы эталонного и обратного сигналов. Далее осуществляется фильтрация сигналов с помощью цифрового фильтра (блок 5) с целью убрать все ненужные пульсации помех.
Рис.4. Схема алгоритма дефектоскопии
В настоящее время существует ряд программных средств для проектирования цифровых фильтров, например, LabView. При проектировании необходимо знать следующие параметры о фильтре:
· Частота дискретизации (sampling frequency) – следует отметить, что аналоговый сигнал должен быть оцифрован с учетом теоремы Котельникова, согласно которой аналоговый сигнал с ограниченным спектром может быть восстановлен без искажений и потерь, если частота дискретизации как минимум вдвое больше верхней частоты аналогового сигнала;
· Полоса пропускания (passband);
· Коэффициент передачи в полосе пропускания (passband ripple);
· Полоса подавления (stopband);
· коэффициент передачи в полосе подавления (stopband ripple).
Ниже на рис.5 приведена графическая иллюстрация этих параметров на примере амплитудно-частотной характеристики фильтра нижних частот (ФНЧ).
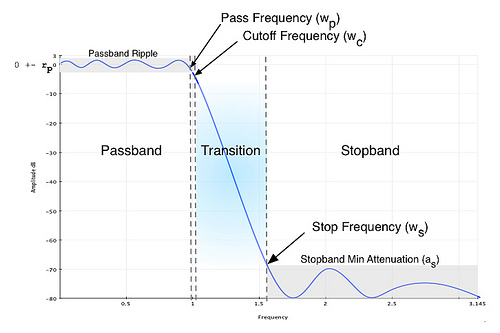
Рис.5. Амплитудно-частотная характеристика фильтра нижних частот
Диагностика объекта контроля должна осуществляться либо при контакте ВТП с ОК, либо при существовании зазора определенной длины между ними. Для определения этого момента осуществляется вычисление максимальных значений отфильтрованных значений (блок 6), поскольку при отдалении ВТП от ОК уменьшается действие вихревого электрического поля на объект контроля, в следствие чего уменьшаются и вихревые токи, протекающие в ОК.
Измерение разности фаз сигналов осуществляется как разность абсцисс двух одинаковых точек сигналов. В качестве таких точек для синусоидального сигнала удобно взять точки перегиба (Рис. 6) – точки, в которых вторая производная равна нулю (блок 7).
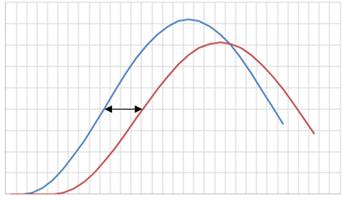
Рис.6. Разность нулей вторых производных
Для вычисления второй производной используется формула численного дифференцирования [6]:
![]()
В виду того, что для нас не имеет значения амплитуда второй производной, тогда формула для элементов массива второй производной примет следующий вид:
![]()
Поскольку работа ведется с оцифрованными сигналами, то возможна ситуация, когда пересечение нуля графиком второй производной приходится между отсчетами (Рис. 7).
Рис.7. Определение нуля второй производной
Для решения этой проблемы можно воспользоваться линейной интерполяцией. Формулу для линейной интерполяции можно вывести из уравнения прямой:
Подставив нужные значения, получим формулу для расчета точки пересечения графиком второй производной нуля:

![]()
После вычисления абсцисс, в которых вторая производная равна нулю, их разность записывается в элемент массива arrayOfDiffs (блок 8), номер которого определяется переменной ind. Также происходит инкремент переменной ind (блок 9).
Далее, в зависимости от значения логической переменнойCalibration_MODE (блок 10), проверяется заполнен ли массив arrayOfDiffs (блоки 11,14). В случае режима калибровки рассчитываются (блок 12) значения математического ожидания, СКО и записываются в глобальные переменные Calibration_MO, Calibration_SKO. Кроме этого максимальное значение, посчитанное в блоке 6 для обратного сигнала, записывается в глобальную переменную Calibration_AMPL. Для расчета математического ожидания и СКО используются следующие формулы:

После расчета статистических характеристик сбрасывается флаг калибровки (блок 13). В случае режима поиска дефектов также рассчитываются значения математического ожидания и СКО (блок 15), на основе которых осуществляется проверка условия наличия дефекта (блок 16). Условие является составным и состоит из 2 условий:
![]()
![]()
где max_value – максимальное значение обратного сигнала, посчитанное в блоке 6; MO, SKO – математическое ожидание и СКО, посчитанные в блоке 15.
В случае выполнения условия включается звуковая индикация (блок 18), иначе звуковая индикация выключается (блок 17). Далее алгоритм переходит в начальную установку (блок. 2).
ГОСТ 15467-79. Управление качеством продукции. URL: http://gostrf.com/normadata/1/4294851/4294851954.pdf
1) ГОСТ 18353-79. Контроль неразрушающий. Классификация видов и методов. URL: http://gostrf.com/normadata/1/4294834/4294834775.pdf
2) Муратов К.Р. ВИХРЕТОКОВЫЙ КОНТРОЛЬ. Методические указания для лабораторных занятий, ТюмГНГУ. Тюмень, 2013.
3) Дефектоскоп вихретоковый ВД-12НФ, паспорт 8715.00.000 ПС, Всесоюзный НИИ железнодорожного транспорта, проектно-конструкторское бюро, Москва, 1987 год