РАЗРАБОТКА РАСПРЕДЕЛЕННОЙ АРХИТЕКТУРЫ СИСТЕМЫ РЕАЛЬНОГО
ВРЕМЕНИ ДЛЯ РЕШЕНИЯ ЗАДАЧИ ИНТЕЛЛЕКТУАЛЬНОГО ПЛАНИРОВАНИЯ
А.Ю. Неделина
(Москва, Московский
Энергетический Институт (Технический Университет), Россия)
Анализ проблем эффективного управления сложными
динамическими объектами показывает необходимость внедрения современных
интеллектуальных технологий в процесс управления. Поскольку принятие компетентных
решений в сложной, быстро меняющейся обстановке - достаточно непростая задача,
актуальным является создание систем поддержки принятия решений реального
времени (СППР РВ) для оказания помощи лицам,
принимающим решения (ЛПР) [1]. Система поддержки принятия решений представляет
собой диалоговую автоматизированную систему, использующую правила принятия
решений и соответствующие модели с базами данных, а также интерактивный
компьютерный процесс моделирования.
Процесс управления сложным объектом с помощью СППР РВ
может быть представлен в виде следующей схемы:
Рис.1. Процесс управления сложным техническим
объектом.
К основным задачам, решаемым с помощью ИСППР РВ,
относятся:
·
диагностика и мониторинг – выяснение где, когда и какого типа возникла
проблемная ситуация;
·
поиск решения (планирование) – нахождение оптимальной или допустимой последовательности действий по достижению
поставленной цели или для разрешения возникшей проблемной ситуации;
·
прогнозирование – оценка на модели эффективности рекомендуемых действий для достижения
цели или разрешения проблемной ситуации.
Планирование является
основой интеллектуального управления. Поэтому вопросы, связанные с планированием как с
основным этапом процесса поиска решения, занимают одно из ведущих мест в
области исследования интеллектуальных систем.
Решение задачи интеллектуального планирования в сложных динамических
средах в условиях неполноты информации возможно лишь при интегрированном
подходе с использованием современных параллельных технологий, позволяющих
существо сократить время решения задачи.
Целью научных исследований является разработка распределенной системы планирования реального времени для систем поддержки принятия решений реального времени.
Разрабатываемая система DIPLAN
относится к системам планирования в пространстве состояний. Пространство состояний можно представить в виде дерева, вершины которого помечены состояниями, а дуги – операторами (действиями).
Изначально
задается некоторое пространство ситуаций. Описание ситуаций включает состояния
внешнего мира и состояния интеллектуальной системы, характеризуемые рядом
параметров. Ситуации образуют некоторые обобщенные состояния, а действия
интеллектуальной системы или изменения во внешней среде приводят к изменению
актуализированных в данный момент состояний. Среди обобщенных состояний
выделены начальные состояния (обычно одно) и конечные (целевые) состояния.
Задача планирования в пространстве состояний состоит в поиске пути, ведущего из
начального состояния в одно из конечных.
В качестве языка описания состояния окружающего мира и
состояния интеллектуальной системы был выбран язык PDDL (Planning
Domain Definition Language),
являющийся принятым стандартом для представления моделей задач планирования
[2].
Наиболее эффективные методы поиска достижения
поставленной цели в пространстве состояний – это эвристические методы поиска
[3]. Однако большая размерность задач
и сложность вычислений существенно снижают применимость эвристических
алгоритмов в интеллектуальных системах типа ИСПП РВ.
В работе было предложено
следующее решение проблемы – применение параллельных алгоритмов эвристического
поиска, позволяющих распределить дерево поиска на поддеревья и обрабатывать поддеревья,
независимо друг от друга отдельными
процессорами.
В качестве
базового для системы планирования была разработан и реализован параллельный
алгоритм итеративного поиска в глубину IDA* (Iterative-Deepening A*)
для MIMD (Multiple Instruction, Multiple Data) архитектуры [4].
На рис. 2 приведена разработанная архитектура
распределенной системы планирования DIPLAN,
состоящая из двух модулей:
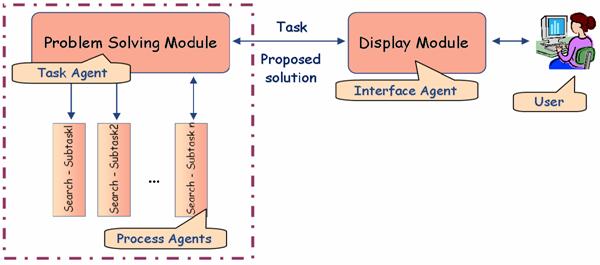
Рис. 2. Архитектура системы планирования DIPLAN.
Основной функциональной компонентой системы является модуль поиска решения,
ориентированный на MIMD-архитектуру. В качестве средств интеграции модулей
использована мультиагентная технология - планирование в системе с
несколькими агентами, работающими над достижением одной цели. Агенты - программные объекты, которые способны
взаимодействовать друг с другом и анализировать полученную информацию. Мультиагентные технологии позволяют сократить сроки решения
проблем за счет параллелизма, уменьшают объем передаваемых данных за счет передачи другим агентам частичных решений, обеспечивая тем самым динамическое решение
проблемы.
В системе разработано три
класса агентов со следующими функциями:
·
интерфейсный
агент (Interface agent) – отвечает за взаимодействие с пользователем, спецификацию входных требований
(т.е. преобразование исходных данных во внутренние структуры системы
планирования), а также отображение полученного решения;
·
агент-координатор (Task agent) –
обеспечивает мониторинг всего сообщества агентов и предоставление отчетов о
состоянии системы, осуществляет декомпозицию общей задачи на локальные
подзадачи, их оптимальное распределение между агентами-процессами и организацию
коллективного поведения. С помощью
данного агента можно управлять жизненным циклом агентов-процессов – запускать,
изменять задание и начальные данные.
·
агенты-процессы
(Process agents) – обрабатывают локальные подзадачи и пересылают результаты агенту
координатору.
В планировщике DIPLAN каждый агент является автономным процессом. Количество агентов-процессов во время параллельных
вычислений меняется динамически в зависимости от количества доступных
процессоров. Коммуникация агентов реализуется в рамках модели передачи
сообщений средствами параллельной технологии
MPI (Message Passing Interface). MPI – стандарт программирования,
предназначенный для поддержки работы параллельных процессов в терминах передачи
сообщений.
Распределенная структура системы ориентирована на
параллельную архитектуру с распределенной памятью. Для программной реализации
системы планирования выбраны кластерные системы как наиболее перспективные,
вследствие наилучшего соотношения
цена/производительность.
В дальнейшем планируется интеграция разрабатываемого
планировщика DIPLAN в блок
поиска решения прототипа ИСППР РВ для мониторинга и управления энергоблоком.
ЛИТЕРАТУРА
|
1. |
Вагин В.И., Еремеев А.П., Некоторые
базовые принципы построения интеллектуальных систем поддержки принятия решений реального времени, Изв. РАН Теория и системы управления, №6, 2001, С.
114-123. |
|
2. |
Drew M.
et al., PDDL—The Planning Domain
Definition Language, |
|
3. |
Nilsson N., Principles of Artificial Intelligence,/ Tioga, |
|
4. |
Eremeyev A.P., Nedelina A.Yu., Methods and algorithms of strategic planning for
decision support systems, Proc. of the 6 Joint Conference on Knowledge-Based
Software Engineering, IOS Press, 2004, С. 247-252. |